Feature Story: Flexible transoral robotic surgery system
Among
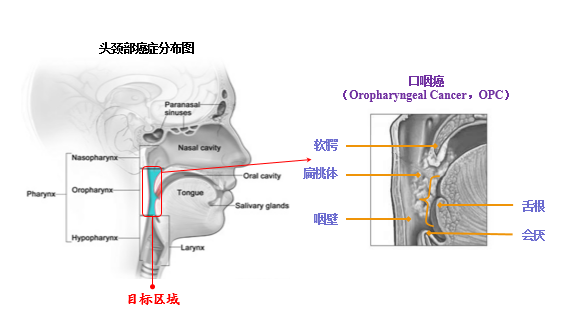
all head-neck cancers, Oropharyngeal cancer comprises about 85%. Today, there
are about 0.7 million people worldwide who are
diagnosed with this cancer in each year.
Owing to industrialisation, the increased number
of smokers and the aggravation of air pollution,
the morbidity of this kind of cancer has seen a
rising trend. Alarmingly, the 5-year survival
rates have hovered around 50% for the past ten years. Surgery
is the most effective treatment done to this kind of cancer. However, due
to the location and the extremely narrow cavity of the oropharynx, as well as limitations of conventional rigid surgical
instruments, surgeons have to open the throat to remove tumors or cancers. From this picture, it is obvious the open
surgery will bring serious trauma to patients, which can lead to significant morbidity.
With the improvement in technology, especially the development of robotics, a less invasive approach is available. This approach is known as transoral robotic surgery. With the assistance of surgical robotic systems, surgeons can conduct treatments through the mouth. Compared with open surgeries, it can benefit patients with reduced morbidity. There is less trauma to muscles or other tissues and patients will not be left with a scar on the face or neck after treatment. The recovery time for patients has also been found to be significantly reduced.

Nowadays,
some robotic systems have been developed and a number of transoral robotic
surgeries have been completed with them. The most widely used one is the da
Vinci surgical system. Its instruments have flexible wrists and can work as dexterously as human hands. Moreover,
it can provide visual feedback to the
surgeon and achieve high accuracy. The teleoperation can
also remove the tremor of the surgeon’s hands.
However, its disadvantages are also obvious. Firstly, the bulky and straight
working arms make manoeuvring in small tight cavities
challenging. The lack of haptic feedback will also bring difficulties to more delicate operations. Lastly, this system is costly in terms of both
initial installation and continued maintenance, which leads to higher costs for patients.


To make
up for these defects a new surgical robotic system that is applicable for
transoral robotic surgery has been developed by Dr Ren
Hongliang’s team of NUSRI.
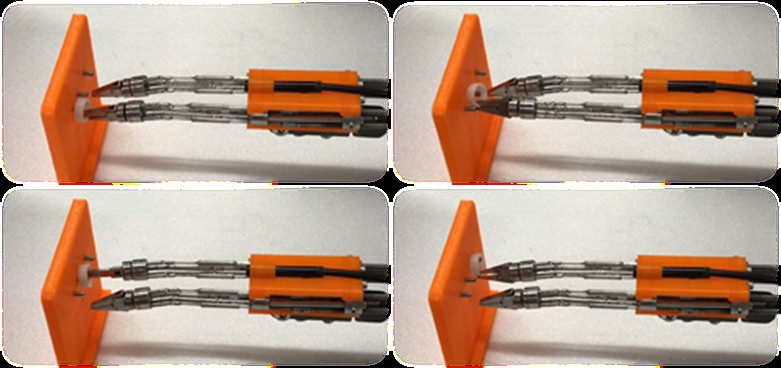
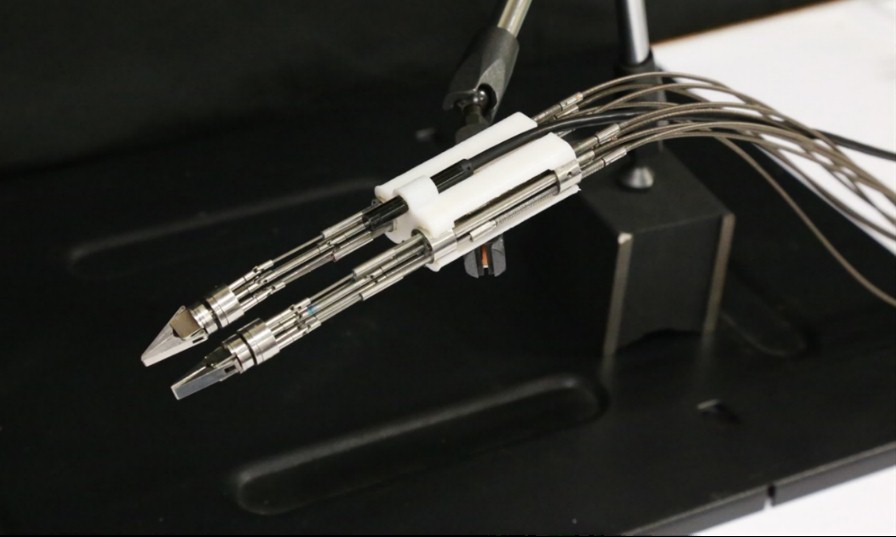
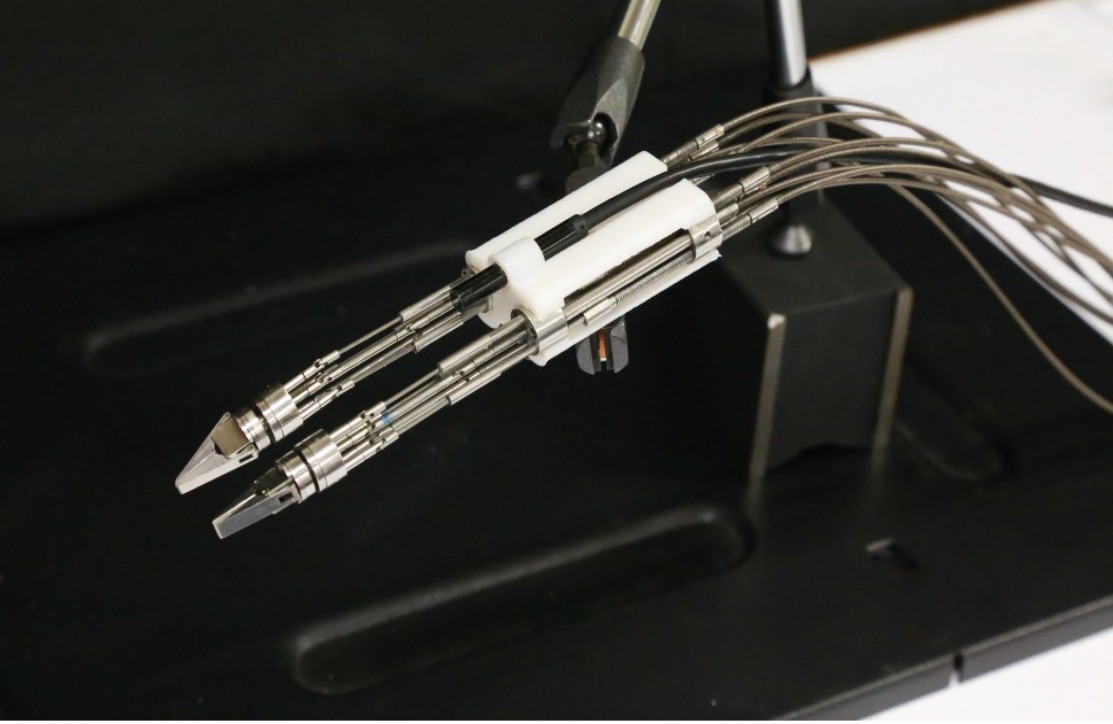
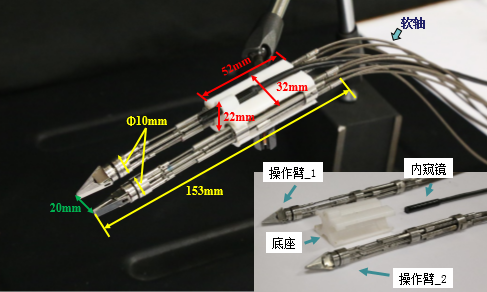
As
shown in Fig.1., the developed surgical robotic system contains two
manipulators and one endoscope with LED illumination. Dexterous and flexible
manipulators are the highlight of this design, which is
comprised of a 3-DOF flexible parallel mechanism and a 2-DOF forceps. The
flexible parallel mechanism utilizes super-elastic Ni-Ti rods and micro
universal joints to achieve two bending motions and one linear motion. Compared
with traditional parallel mechanisms, it has a more compact structure, enhanced
dexterity and lower manufacturing cost.
Additionally, the forceps are able to achieve
360° rotations and easily lift objects of 500
grams. As such, designed manipulators have adequate flexibility and grasping force in
confined and complex working environments.
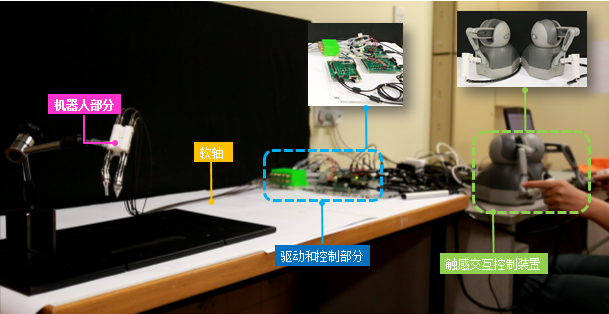
The
flexible shaft is employed to transmit force in this surgical robotic system,
which allows actuators to be separated from the main body of the robot
contributing to the reduced size of the robot. Operators can use controllers to
achieve tele-operation of this system. Two manipulators are capable of
achieving multi-DOF dexterous manipulations.


